Is a Modular Encoder Right for Your Application?
 Introduction
Introduction
Modular, or "Kit", encoders are actually a specialized category of rotary encoders. The difference between a modular encoder and a standard encoder is that the modular encoder does not incorporate internal bearings into its design. Instead, it relies on the host, typically a motor, to supply the structural integrity necessary for proper operation.
At first glance, this approach seems to be a good idea, since eliminating the bearings can lower the price of the encoder and give the overall encoder a lower height profile. For these reasons, Modular Encoders are often favored by motor manufacturers.
However, modular encoders are definitely not a panacea, and can be good or bad, depending upon personal experience. The root problem is not modular encoders themselves, but the fact that they are often misapplied, and a proper understanding of the tradeoffs involved will go a long ways towards preventing a bad experience.
The primary purpose of this article is to help you determine whether or not a modular encoder is the right choice for your application. In addition, you will better understand the tradeoffs involved, and proper implementation, so that you will see only benefits. When applying modular encoders, there are several important considerations that often get overlooked, but, before we discuss them in detail, let's review what is critical for an encoder's reliable operation.
Critical Design Elements
To produce reliable output signals, proper axial and radial alignment between the rotating disk and the sensor must be established and maintained. It is here that the primary area for potential problems occurs. In standard encoders, this relationship can be properly calibrated at the factory, and can be more easily maintained in the field. However, since modular encoders do not have bearings, and their most common use involves mounting them on a motor, the motor's bearings and shaft assembly must serve as the encoder's optical platform.
Understandably, AC motors are designed to be motors and their design engineers rarely take into consideration the requirements represented by encoders. Even when the newer, more tolerant sensor technology is used (such as that in EPC's Model 121 Modular Encoders), the motor must still meet certain criteria. The two most common motor specifications that affect encoder operation are the shaft's axial movement (end float or end play) and the shaft's total indicated runout (TIR).

Axial Motor Shaft Movement (End Float or End Play)
End float refers to the amount of axial movement in the motor shaft. There are a number of factors that can contribute to axial motor shaft movement including part tolerances, bearing pre-load method, thermal expansion, and bearing wear over time. When an encoder is mounted, the amount of end float directly affects the encoder's air-gap (the distance between the sensor and the disk). It can be difficult to obtain end float specifications from the motor manufacture, and even when you do, the information may not be correct.
Some motor designs mechanically lock the shaft's axial movement on the feedback end so that end float is minimal. Other motor designs often use a wave spring washer to take up any excess play and provide a pre-load force to the bearings. In this case, you cannot assume that the end float has been removed by the wave washer, since this is only true until an opposing axial force on the end of the shaft overcomes the spring force of the wave washer allowing the shaft to move. The results on a modular encoder mounted to this shaft could be disastrous, potentially causing the encoder disc to hit the sensor. Examples where this situation can occur are:
When a motor shaft is connected to a ball screw, as the motor changes direction, the force from the ball screw will also change directions. This alternating force may cause the motor shaft to move axially.
If a sprocket, pulley, or gear with some side wobble is mounted on the motor shaft, the wobble may cause an alternating axial load to the motor shaft.
Total Indicated Runout (TIR)
Total Indicated Run-out (TIR) measures the radial range of shaft movement about its centerline. If an encoder is to be mounted on the motor shaft, TIR should be measured at that point that represents the furthest extent of the encoder case. For example, if the encoder is one inch thick, TIR should be measured about 1" from the motor face. Although many encoders with new technology sensors will continue to operate as TIR increases beyond the specified tolerance, accuracy will be sacrificed.
Encoders with Bearings
Optical encoders (such as Encoder Products Company's Models 755A and 260) usually include internal bearings. With bearings, the amount of axial play is typically controlled to less than 0.0005". In addition, the disk is carefully aligned to the optics as part of the calibration procedure to keep radial run out less than 0.0002" typical. In this manner, the critical factors of end float and TIR are controlled and will not be affected by the motor shaft in normal operation. A stainless steel flex mount allows the encoder to tolerate increased TIR and end float from the motor without sacrificing encoder performance or damaging it.
Selection Criteria
- Consider these factors when choosing between a modular encoder and an encoder with bearings:
- First and foremost, motor shaft end float and TIR must be within the encoder's specifications. This is so important that if you don't have (or can't get) this information on the motor, or don't trust what you have, then an encoder with bearings is a much safer choice.
- Modular encoders can be a good choice for high-speed applications, those above 10,000 RPM, because there are no speed limitations dictated by encoder bearings. For example, EPC's Model 121 Modular Encoder has been successfully operated at speeds in excess of 40,000 RPM.
- If the motor is to be used under considerable load, where the motor bearings could experience extra wear, then an encoder with bearings would be the better choice.
- Modular encoders are difficult to seal. If your application needs wash down, your environment is dirty, etc., then an encoder with bearings and seals should be your first consideration, effectively ruling out modular encoders, unless external protection is used.
- If your application involves a combination of high frequency response (> 200kHz), high temperatures (100C or higher), and higher resolutions (>2048 CPR), then an encoder with bearings is recommended. This combination requires that the air-gap be smaller and better controlled for long term reliability. An encoder with bearings simply provides a better optical platform.
- Lower resolutions in general (up to 1024 CPR) are more forgiving to end float and TIR, and are well suited for modular applications.
- If you plan to use a lot of encoders, then the lower price of a modular encoder could save you some money. On the other hand, the additional durability and ease of installation of an encoder with bearings might easily be worth the slightly higher price. In any case, you should carefully weigh the factors of long term support costs versus slightly lower acquisition costs before making your final decision.
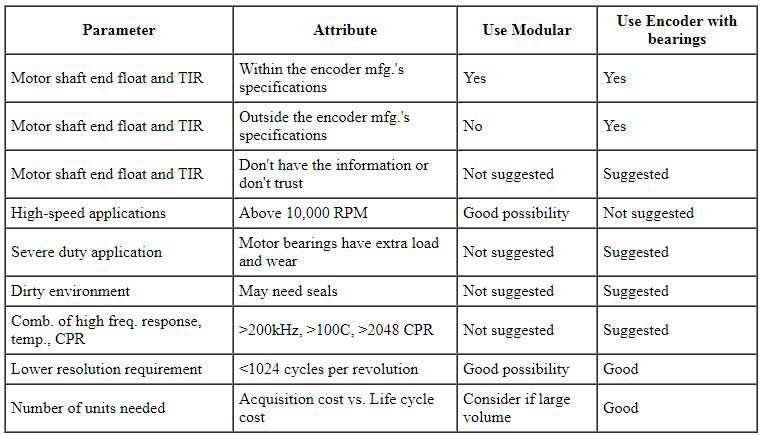
Quick Selection Chart (listed in order of importance):
Conclusion
If you have decided that a modular encoder is the right choice, model 121 self-aligning encoder is the best modular encoder anywhere. It's innovative, patent pending design eliminates the installation and mounting hassles typical of other modulars. As a result, the Model 121 does not need calibration gapping or special tools to install. In fact, it's three step installation is the simplest and quickest in the industry. What's more, the Model 121's all-metal construction will not warp or deflect (like non-metal designs), making it the most durable and reliable modular encoder available.